

DRONES Y GANADERÍA DE PRECISIÓN
Introducción
Los drones son una de las tecnologías que actualmente se encuentra muy en auge en el mundo de la aeronáutica, motivo por el cual cada vez son más los productos disponibles en el mercado. Un dron es una aeronave que vuela sin tripulación y que se maneja mediante control remoto. Para referirse a ellos se emplean diferentes nombres en los que destacan:
- UAV (Unmanned Aerial Vehicle), es decir, vehículo aéreo no tripulado, término que señala a cualquier dispositivo capaz de volar sin tripulación, que puede incluir un juguete de radiocontrol.
- UAS (Unmanned Aerial System), entendido como el conjunto de componentes en sí.
- Dron, término hasta cierto punto sinónimo de UAS, aunque más concreto, puesto que un dron es un sistema aéreo no tripulado, el cual se usa para una función concreta, es decir, es un UAS al que se le añade por ejemplo una cámara que se utilizará para ganadería, tal y como se explicará a continuación.
- RPA (Remotely Piloted Aircraft), que corresponde a una forma más concreta y detallada de llamar a los UAV. Hace referencia a que la aeronave está siendo pilotada, de manera remota, por una persona física.
- Multicópteros, aeronaves que tienen múltiples rotores con la capacidad de despegar de forma vertical.
Las partes básicas de un dron son:
- Motores, hélices y ESCs, son los componentes clave para mantener el dron en el aire. Los ESCs (Electronic Speed Control), regulan la potencia eléctrica que es suministrada a los motores, es decir, la velocidad de giro del rotor, que deja suspendida la aeronave en el aire gracias a las hélices.
- Controlador de vuelo, que podría considerarse el cerebro de la máquina, puesto que controla todos los aspectos de la misma. Prácticamente la totalidad de los componentes electrónicos van conectados al controlador de vuelo.
- Mando o controlador remoto, dispositivo a través del cual se dan las indicaciones de los movimientos que debe realizar el dron.
- Radio receptor, corresponde al componente que recibe las órdenes del mando, para después transmitirlas al controlador de vuelo, de manera que la instrucción pueda ser ejecutada mediante variaciones en la velocidad de los rotores, encargados de alterar el curso del dron a voluntad del usuario.
- Baterías, son las encargadas de proporcionar la energía necesaria para que el dron realice todas sus funciones. Generalmente son de polímero de litio, de bajo peso y alta descarga.
Existen diferentes clasificaciones de drones, en función a diferentes aspectos, como son las sustentación y el número de brazos. El principal método de clasificación se basa en la forma de sustentarse en el aire, en base a la cual se distingue entre drones de ala fija y drones multirrotor. Los de ala fija son aquellos que para poder sustentarse en el aire precisan una velocidad de vuelo inicial, lo que significa que no son capaces de efectuar un despegue por sí solos, precisando una persona o mecanismo que los lance. A nivel estético podría decirse que se trata de lo más parecido a un avión. La aerodinámica que presentan hace que tengan una gran autonomía de vuelo, pudiendo volar en el transcurso de varias horas, motivo por el cual son lo más idóneo para recorrer grandes extensiones. En el caso de los multirrotor o ala rotatoria, la sustentación se debe a las hélices incorporadas en los extremos de cada uno de los brazos. Cada una de estas hélices es impulsada por un motor, que asegura una gran estabilidad durante el vuelo. A diferencia de lo que sucede con los drones de ala fija, estos pueden permanecer sobrevolando un mismo punto quietos. Se trata de las aeronaves no tripuladas más vendidas en el mercado. En función del número de drones se efectúa una clasificación entre tricópteros, cuadricópteros, hexacópteros, octópteros y coaxiales. Los tricópteros, como su propio nombre indica, se componen de tres brazos y tres motores. Los dos delanteros giran en dirección opuesta, logrando así que se contrarresten entre sí y el tercero, localizado en la parte trasera, que trabaja con un servomotor, aportando estabilidad durante el vuelo. Los cuadricópteros, compuestos de cuatro brazos y cuatro motores son los más habituales en el mercado y los más utilizados. A su vez, de entre los drones profesionales, los más comunes son los hexacópteros, debido a su estabilidad a la hora de realizar tomas aéreas de fotografía y vídeo. Asimismo, otra de las características más importantes de este tipo reside en la seguridad que poseen, ya que es posible aterrizarlos incluso cuando pierden alguno de los motores durante un vuelo. Dado que cuantos más brazos y motores tenga un dron, mayor será su estabilidad y potencia, los octocópteros son de los más potentes y estables, aunque debido a ello tienden a ser mucho más pesados y difíciles de manejar, sobre todo en lugares pequeños. Por último, los coaxiales difieren de todos los anteriores respecto al número de motores por brazo, presentando dos motores por cada uno de ellos, siendo así capaces de soportar pesos superiores. Se considera que son la mejor opción para trabajos profesionales.
A la hora de pilotar un dron es imprescindible consultar la normativa de cada país, en la que queda reflejado claramente los lugares y la altitud a la que se podrá volar, entre otras especificaciones. Además, a la hora de desempeñar una actividad de tipo profesional con drones profesionales, es obligatoria la licencia de piloto, es decir, que deben poder acreditarse una serie de conocimientos tanto teóricos como prácticos; estar dado de alta como operador de la AESA (Agencia Estatal de Seguridad Aérea); tener seguro de responsabilidad civil; y tener certificado médico en vigor.
Cámaras
Dentro del campo de la ganadería de precisión, además de la aeronave se precisan unas cámaras, las cuales pueden medir una señal electromagnética que reflejan o emiten los objetos, para posteriormente convertirla en una magnitud física medible, que puede ser tratada y registrada. Este procedimiento o técnica a partir de la cual se adquiere información sin tener un contacto directo con el elemento que se pretende analizar se denomina teledetección, cuyo fin es capturar, tratar y analizar una serie de imágenes digitales. Dentro de la teledetección se puede hablar de teledetección pasiva, la cual mide la radiación electromagnética, como respuesta a la incidencia de radiación natural (luz solar); y la teledetección pasiva, en la cual se emplea una radiación artificial. El componente reflectivo de los diversos objetos es variable y está condicionado por factores externos, como son las condiciones ambientales e internos, es decir, por las características físico-químicas del momento en que se está tomando la imagen.
La energía electromagnética es un tipo de energía transmitida por el espacio a través de ondas con una cierta velocidad. Una onda electromagnética es el resultado de la propagación simultánea en el espacio de un campo eléctrico y otro magnético, variables, dada su forma de propagación. Los diferentes tipos se definen por su longitud de onda (h) o por la frecuencia (F). La longitud de onda hace referencia al carácter periódico de esta perturbación, siendo definida como la distancia entre dos picos contiguos de uno de los campos y, por tanto, se mide en unidades de longitud. La frecuencia está relacionada con el número de ciclos que pasan por un punto fijo, por unidad de tiempo, lo cual se mide en hercios (Hz). La longitud de onda y la frecuencia son las características que permiten hacer una clasificación entre los distintos tipos de energía electromagnética, cuyo conjunto recibe el nombre de espectro electromagnético, recibiendo cada uno de ellos una denominación particular como ultravioleta o infrarrojo. Puede establecerse que existe una relación inversamente proporcional entre la longitud de onda y la frecuencia, de manera que a una mayor frecuencia, menor será la longitud de onda y viceversa. La energía electromagnética que recibe la superficie terrestre sufre diferentes procesos. Una parte puede ser reflejada, mientras que el resto penetra en los diferentes elementos de la superficie a través de ondas refractadas, que a su vez pueden ser absorbidas o transmitidas, lo cual depende de la naturaleza de los objetos y de la longitud de onda de la energía. La energía que es absorbida, posteriormente es devuelta en forma de energía emitida por los objetos, aunque la emisión se produce en otras longitudes de onda, generalmente más largas, dependiendo de la temperatura. Por ello, la energía incidente es la suma de la energía reflejada, absorbida y transmitida. Las proporciones de estas energías varían para cada objeto, lo que permite hacer una discriminación entre ellos mediante la aplicación de los sistemas de teledetección. Además, para un mismo objeto, estas proporciones sufren variaciones con diferentes longitudes de onda, por lo que los objetos pueden no ser distinguibles en una porción del espectro y perfectamente diferenciables en otra.
En definitiva, cada objeto de la superficie terrestre emite energía electromagnética con una intensidad que depende de la temperatura, lo que permite que pueda ser utilizada para su identificación, lo que está relacionado con la emisividad, que corresponde a la proporción de energía emitida, respecto a la incidente o lo que es lo mismo, a la proporción entre la energía emitida por un objeto y la que emitirá un perfecto emisor (cuerpo negro) a la misma temperatura. Todo ello conduce al término firma espectral, que es el conjunto de valores característicos y propios de cada objeto, captados para los diferentes campos del espectro de los que se obtiene información. Un mismo objeto puede variar su respuesta espectral en función de su estado y la relación con el entorno.
- Cámaras termográficas
La base del funcionamiento de las cámaras termográficas o térmicas se fundamenta en que todos los objetos que se encuentran a una temperatura superior a lo que se considera como 0 absoluto, es decir 0K (-273ºC), emiten una radiación infrarroja. La intensidad de esta radiación infrarroja aumenta en función de la temperatura superficial del cuerpo. Esta diferencia respecto a las temperaturas no es visible al ojo humano, puesto que su rango en el espectro electromagnético se encuentra en entre la luz visible y la radiación de microondas, motivo por el cual se precisan sensores que realizan lo que se conoce como termograma o patrón de temperaturas, el cual es enviado a un procesador, obteniendo una imagen en la que se muestran estas variaciones en una escala de grises o de color.
En ganadería de precisión el uso de este tipo de cámaras se centra fundamentalmente en el estudio de las variaciones de la temperatura del ganado, con el fin de detectar precozmente las diferentes patologías que puedan desarrollar, favoreciendo el diagnóstico, evitando complicaciones y asegurando el bienestar; y en la localización de animales, que en zonas de ganadería extensiva puedan llegar a perderse o en la búsqueda de vacas que puedan encontrarse de parto para asegurar la seguridad del animal y su cría, sobre todo en aquellos casos en los que se sospeche de posibles complicaciones en el mismo.
- Cámaras multiespectrales
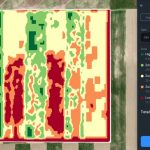
Como su propio nombre indica, son cámaras capaces de captar una amplia variedad de espectros de la luz, lo que significa que pueden recoger imágenes haciendo uso de diferentes frecuencias de onda simultáneamente, es decir, que no se limitan únicamente al espectro de la luz visible percibida por el ojo humano. A partir de las imágenes multiespectrales que se obtienen lo que se conoce como índices de vegetación, definidos como el parámetro obtenido como resultado de la combinación de dos o más valores de reflectancia a diferentes longitudes de onda, con los que puede resaltarse alguna característica concreta de un pasto. El índice ideal es aquel sensible a la cubierta vegetal, insensible al brillo y color del suelo y poco afectado por perturbaciones atmosféricas, factores medioambientales y las geometrías de la iluminación y de la observación.
Estas cámaras se emplean en multitud de instancias, como uno de los últimos proyectos que estamos llevando a cabo, en el cual se ha conseguido medir la variabilidad de pastos y alfalfa, con el fin de optimizar así la carga ganadera por zonas, evitando así una degradación excesiva del medio y garantizando que en años posteriores pueda se pueda disponer de alimento para los animales en esos mismos lugares. Asimismo, se dispone de un inventario digital con el que pueden mejorarse los procesos de gestión ganadera.
Si precisáis orientación para potenciar el rendimiento de vuestra ganadería mediante el aprovechamiento de la tecnología de drones, nuestro Fundador y CEO, Carlos García, es un experto en análisis de precisión con drones. En Innovatione, la investigación, el desarrollo y la innovación son pilares fundamentales, motivo por el cual dedicamos todos nuestros esfuerzos a proporcionar soluciones eficaces.





Este tipo de sistemas de innovación y precisión cada vez son más útiles, fiables y utilizados en el trabajo de campo. Es una evolución que ya está siendo visible.