DRONES ET ÉLEVAGE DE PRÉCISION
Introduction
Les drones sont l’une des technologies actuellement en plein essor dans le monde de l’aéronautique, c’est pourquoi de plus en plus de produits sont disponibles sur le marché. Un drone est un aéronef qui vole sans pilote et qui est commandé à distance. Différents noms sont utilisés pour les désigner, notamment :
- UAV (Unmanned Aerial Vehicle), c’est-à-dire véhicule aérien sans pilote, un terme désignant tout dispositif capable de voler sans pilote, ce qui peut inclure un jouet radiocommandé.
- UAS (Unmanned Aerial System), c’est-à-dire l’ensemble des composants eux-mêmes.
- Drone, un terme en quelque sorte synonyme de UAS, bien que plus spécifique, puisqu’un drone est un système aérien sans pilote, qui est utilisé pour une fonction spécifique, c’est-à-dire qu’il s’agit d’un UAS auquel on ajoute, par exemple, une caméra à utiliser pour l’élevage, comme cela sera expliqué plus loin.
- RPA (Remotely Piloted Aircraft), qui est une manière plus spécifique et détaillée de désigner les drones. Il s’agit du fait que l’avion est piloté à distance par une personne physique.
- Multicoptères, avions dotés de plusieurs rotors et capables de décoller verticalement.
Les pièces de base d’un drone sont :
- Les moteurs, les hélices et les ESC sont les composants clés qui permettent au drone de rester dans les airs. Les ESC (Electronic Speed Control), régulent la puissance électrique qui est fournie aux moteurs, c’est-à-dire la vitesse de rotation du rotor, qui laisse l’avion suspendu dans l’air grâce aux hélices.
- Le contrôleur de vol, qui pourrait être considéré comme le cerveau de la machine, car il contrôle tous les aspects de la machine. La quasi-totalité de l’électronique est connectée au contrôleur de vol.
- Télécommande ou contrôleur, dispositif par lequel sont données les instructions pour les mouvements à effectuer par le drone.
- Le récepteur radio, qui est le composant qui reçoit les commandes de la télécommande et les transmet ensuite au contrôleur de vol, afin que l’instruction puisse être exécutée par le biais de variations de la vitesse des rotors, qui sont chargés de modifier la trajectoire du drone au gré de l’utilisateur.
- Les batteries sont chargées de fournir l’énergie nécessaire pour que le drone puisse remplir toutes ses fonctions. Ils sont généralement fabriqués en polymère de lithium, de faible poids et à haute décharge.
Il existe différentes classifications de drones, en fonction de différents aspects, tels que la portance et le nombre de bras. La principale méthode de classification est basée sur la manière dont ils se maintiennent dans l’air, sur la base de laquelle on distingue les drones à voilure fixe et les drones multi-rotors. Les drones à voilure fixe sont ceux qui ont besoin d’une vitesse de vol initiale pour planer dans l’air, ce qui signifie qu’ils ne sont pas capables de décoller par eux-mêmes et qu’ils ont besoin d’une personne ou d’un mécanisme pour les lancer. Esthétiquement, ils sont ce qui se rapproche le plus d’un avion. Leur aérodynamisme leur confère une grande autonomie de vol, puisqu’ils peuvent voler pendant plusieurs heures, ce qui explique qu’ils soient les plus adaptés à la couverture de grandes zones. Dans le cas du multi-rotor ou de l’aile rotative, la portance est assurée par les hélices incorporées aux extrémités de chacun des bras. Chacune de ces hélices est entraînée par un moteur, ce qui assure une grande stabilité en vol. Contrairement aux drones à voilure fixe, ces drones peuvent rester en vol stationnaire en un seul point. Ce sont les aéronefs sans pilote les plus vendus sur le marché. En fonction du nombre de drones, ils sont classés en tricoptères, quadcoptères, hexacoptères, octoptères et drones coaxiaux. Les tricoptères, comme leur nom l’indique, sont composés de trois bras et de trois moteurs. Les deux bras avant tournent dans des directions opposées, se contrecarrant ainsi l’un l’autre, et le troisième, situé à l’arrière, fonctionne avec un servomoteur, assurant la stabilité pendant le vol. Les quadcoptères, composés de quatre bras et de quatre moteurs, sont les plus courants sur le marché et les plus utilisés. À leur tour, parmi les drones professionnels, les plus courants sont les hexacoptères, en raison de leur stabilité lors de la prise de photos et de vidéos aériennes. Une autre des caractéristiques les plus importantes de ce type est leur sécurité, car il est possible de les faire atterrir même s’ils perdent un de leurs moteurs pendant un vol. Étant donné que plus un drone possède de bras et de moteurs, plus sa stabilité et sa puissance sont grandes, les octocoptères font partie des drones les plus puissants et les plus stables, bien qu’à cause de cela, ils aient tendance à être beaucoup plus lourds et plus difficiles à manipuler, surtout dans les petits endroits. Enfin, les coaxiaux se distinguent de tous les systèmes ci-dessus par le nombre de moteurs par bras, qui sont au nombre de deux par bras, et sont donc capables de supporter des poids plus lourds. Ils sont considérés comme le meilleur choix pour les travaux professionnels.
Pour faire voler un drone, il est essentiel de consulter la réglementation de chaque pays, qui indique clairement les lieux et l’altitude auxquels il peut être piloté, entre autres spécifications. En outre, lorsqu’on exerce une activité professionnelle avec des drones professionnels, la licence de pilote est obligatoire, ce qui signifie qu’il faut accréditer une série de connaissances théoriques et pratiques, être inscrit comme opérateur auprès de l’AESA (Agence espagnole de sécurité aérienne), disposer d’une assurance de responsabilité civile et avoir un certificat médical valide.
Caméras
Dans le domaine de l’élevage de précision, outre l’avion, il faut des caméras, qui peuvent mesurer un signal électromagnétique réfléchi ou émis par des objets, puis le convertir en une grandeur physique mesurable, qui peut être traitée et enregistrée. Ce procédé ou cette technique permettant d’acquérir des informations sans avoir de contact direct avec l’élément à analyser est appelé télédétection, dont le but est de capturer, traiter et analyser une série d’images numériques. Dans le cadre de la télédétection, nous pouvons parler de télédétection passive, qui mesure le rayonnement électromagnétique en réponse à l’incidence du rayonnement naturel (lumière du soleil), et de télédétection passive, dans laquelle un rayonnement artificiel est utilisé. La composante réfléchissante des différents objets est variable et est conditionnée par des facteurs externes, tels que les conditions environnementales, et des facteurs internes, c’est-à-dire les caractéristiques physico-chimiques au moment de la prise de vue.
L’énergie électromagnétique est un type d’énergie transmise dans l’espace par des ondes ayant une certaine vitesse. Une onde électromagnétique est le résultat de la propagation simultanée dans l’espace d’un champ électrique et d’un champ magnétique, qui sont variables, compte tenu de leur mode de propagation. Les différents types sont définis par leur longueur d’onde (h) ou leur fréquence (F). La longueur d’onde fait référence au caractère périodique de cette perturbation, étant définie comme la distance entre deux pics contigus de l’un des champs et est donc mesurée en unités de longueur. La fréquence est liée au nombre de cycles passant par un point fixe, par unité de temps, qui est mesuré en Hertz (Hz). La longueur d’onde et la fréquence sont les caractéristiques qui permettent d’établir une classification entre les différents types d’énergie électromagnétique, dont l’ensemble est appelé spectre électromagnétique, chacun d’entre eux recevant une dénomination particulière comme l’ultraviolet ou l’infrarouge. On peut établir qu’il existe une relation inversement proportionnelle entre la longueur d’onde et la fréquence, de sorte que plus la fréquence est élevée, plus la longueur d’onde est courte et vice versa. L’énergie électromagnétique reçue par la surface de la terre subit différents processus. Une partie peut être réfléchie, tandis que le reste pénètre les différents éléments de la surface par des ondes réfractées, qui peuvent à leur tour être absorbées ou transmises, selon la nature des objets et la longueur d’onde de l’énergie. L’énergie absorbée est ensuite restituée sous forme d’énergie émise par les objets, bien que l’émission se fasse à d’autres longueurs d’onde, généralement plus longues, en fonction de la température. L’énergie incidente est donc la somme de l’énergie réfléchie, absorbée et transmise. Les proportions de ces énergies varient pour chaque objet, ce qui permet de les distinguer par l’application de systèmes de télédétection. De plus, pour un même objet, ces rapports varient à différentes longueurs d’onde, de sorte que les objets peuvent être indiscernables dans une partie du spectre et parfaitement distinguables dans une autre.
En résumé, chaque objet à la surface de la terre émet de l’énergie électromagnétique avec une intensité qui dépend de la température, ce qui permet de l’utiliser pour l’identification. Ceci est lié à l’émissivité, qui correspond au rapport entre l’énergie émise et l’énergie incidente ou, en d’autres termes, au rapport entre l’énergie émise par un objet et celle qu’un émetteur parfait (corps noir) émettrait à la même température. Tout cela conduit au terme de signature spectrale, qui est l’ensemble des valeurs caractéristiques propres à chaque objet, saisies pour les différents champs du spectre dont on tire des informations. Un même objet peut varier sa réponse spectrale en fonction de son état et de sa relation avec l’environnement.
- Caméras d’imagerie thermique
La base du fonctionnement des caméras thermographiques ou thermiques repose sur le fait que tous les objets qui se trouvent à une température supérieure à ce qui est considéré comme le 0 absolu, c’est-à-dire 0K (-273ºC), émettent un rayonnement infrarouge. L’intensité de ce rayonnement infrarouge augmente en fonction de la température de surface du corps. Cette différence de température n’est pas visible à l’œil humain, car sa plage dans le spectre électromagnétique se situe entre la lumière visible et les micro-ondes. C’est pourquoi des capteurs sont nécessaires pour produire ce que l’on appelle un thermogramme ou un modèle de température, qui est envoyé à un processeur, obtenant une image dans laquelle ces variations sont représentées sur une échelle de gris ou de couleurs.
Dans l’élevage de précision, l’utilisation de ce type de caméra est principalement axée sur l’étude des variations de température du bétail, dans le but de détecter de manière précoce les différentes pathologies qui peuvent se développer, en favorisant le diagnostic, en évitant les complications et en garantissant le bien-être ; et dans la localisation des animaux qui, dans les zones d’élevage extensif, peuvent se perdre ou dans la recherche des vaches qui peuvent être en travail pour garantir la sécurité de l’animal et de sa progéniture, surtout dans les cas où l’on soupçonne de possibles complications chez ces derniers.
- Caméras multi-spectrales
Como su propio nombre indica, son cámaras capaces de captar una amplia variedad de espectros de la luz, lo que significa que pueden recoger imágenes haciendo uso de diferentes frecuencias de onda simultáneamente, es decir, que no se limitan únicamente al espectro de la luz visible percibida por el ojo humano. A partir de las imágenes multiespectrales que se obtienen lo que se conoce como índices de vegetación, definidos como el parámetro obtenido como resultado de la combinación de dos o más valores de reflectancia a diferentes longitudes de onda, con los que puede resaltarse alguna característica concreta de un pasto. El índice ideal es aquel sensible a la cubierta vegetal, insensible al brillo y color del suelo y poco afectado por perturbaciones atmosféricas, factores medioambientales y las geometrías de la iluminación y de la observación.
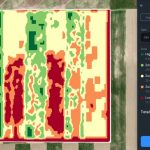
Estas cámaras se emplean en multitud de instancias, como uno de los últimos proyectos que estamos llevando a cabo, en el cual se ha conseguido medir la variabilidad de pastos y alfalfa, con el fin de optimizar así la carga ganadera por zonas, evitando así una degradación excesiva del medio y garantizando que en años posteriores pueda se pueda disponer de alimento para los animales en esos mismos lugares. Asimismo, se dispone de un inventario digital con el que pueden mejorarse los procesos de gestión ganadera.
Comme leur nom l’indique, il s’agit de caméras capables de capturer une grande variété de spectres lumineux, ce qui signifie qu’elles peuvent recueillir des images utilisant simultanément différentes fréquences de longueur d’onde, c’est-à-dire qu’elles ne sont pas limitées au spectre de la lumière visible perçue par l’œil humain. À partir des images multispectrales, nous obtenons ce que l’on appelle des indices de végétation, définis comme le paramètre obtenu à la suite de la combinaison de deux ou plusieurs valeurs de réflectance à différentes longueurs d’onde, avec lequel une caractéristique spécifique d’une herbe peut être mise en évidence. L’indice idéal est celui qui est sensible à la couverture végétale, insensible à la luminosité et à la couleur du sol et peu affecté par les perturbations atmosphériques, les facteurs environnementaux et les géométries d’éclairage et d’observation.
Ces caméras sont utilisées dans de nombreux cas, comme l’un des derniers projets que nous menons à bien, dans lequel nous avons réussi à mesurer la variabilité des pâturages et de la luzerne, afin d’optimiser le taux de chargement par zones, évitant ainsi une dégradation excessive de l’environnement et garantissant que, les années suivantes, les aliments seront disponibles pour les animaux aux mêmes endroits. Un inventaire numérique est également disponible et peut être utilisé pour améliorer les processus de gestion du bétail.